近日,化学工程领域国际权威期刊《Chemical Engineering Journal》(2023影响因子13.3,中科院一区)报道了我院“微纳生物技术”创新团队孟涛教授的研究成果“SCbots: Stomatocyte-like colloidosomes as versatile microrobots fabricated by one-step self-assembly”中文译名:“口形红细胞样胶体囊微机器人:一步自组装法制备口形红细胞样胶体囊微机器人”(DOI: 10.1016/j.cej.2024.151952)。论文第一作者为生命科学与工程学院2019级硕士研究生尹伟,通讯作者为郭婷老师和孟涛教授,西南交通大学为唯一署名单位和通讯作者单位。
作为21世纪纳米技术的尖端产物,微机器人凭借其小尺寸和独特的运动性能有望为解决生物医药、环境修复和传感检测等领域的困难任务带来革命性的解决方案。目前,几何不对称微机器人,一般需以特定材料经特定步骤制备出如火箭状、瓶状、降落伞状等载体,常面临材料选择局限性大,方法不通用等问题。动力源不对称分布微机器人,一般需先将部分载体掩蔽而后改性再释放形成Janus结构,步骤繁琐、条件苛刻,尤其对制备生物活性动力微机器人不友好。由此看来,发展能够在温和条件下,通过简单、高效、价廉的方法形成不对称结构,且拥有较宽可选材料范围的微机器人构筑新方法备受期待。
图1 口形红细胞样胶体囊微机器人的自主运动
文章亮点:①开发了一种载酶胶体囊的气泡驱动型微机器人(图1),微机器人的酶活保留率高达91%;②本研究提出的制备方法为不对称性微机器人的构建提供了新平台(图2);③以框架颗粒二氧化硅、动力酶过氧化氢酶(CAT)和反应酶碳酸酐酶(CA)为积木组合,组建出了用于“on-the-fly”仿生封存温室气体二氧化碳的微机器人(CAT/CA-SCbots)。
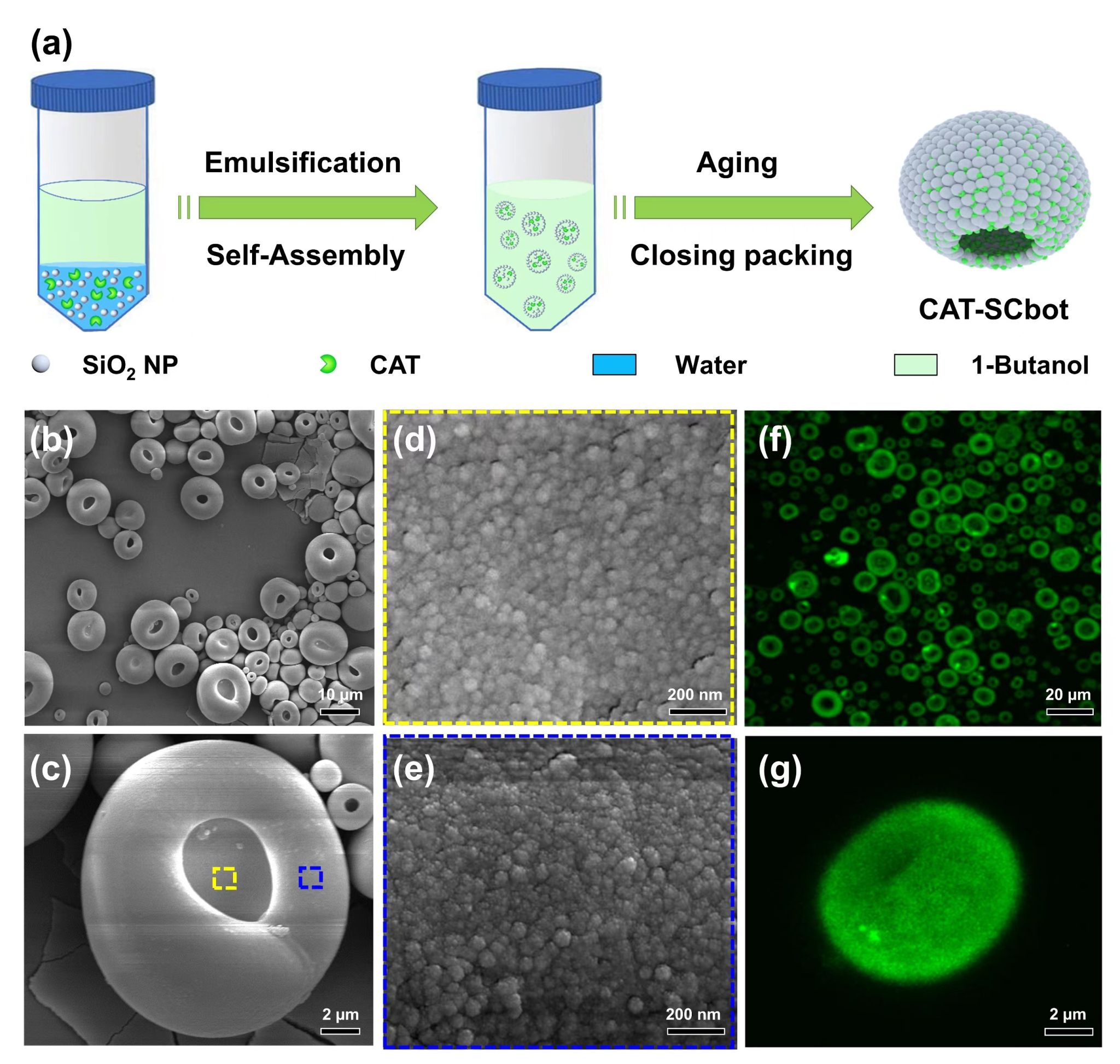
图2 口形红细胞样胶体囊微机器人(SCbots)的制备和表征

总结展望:本研究提供了一种灵活可行的方法来控制微机器人的速度、方向和功能。理想情况下,通过集成具有不同功能的模块单元,例如传感、成像、刺激反应和治疗,可用来设计和定制更多元的微机器人,以完成各种领域的复杂任务。
该研究得到国家自然科学基金项目(22378336, 21776230, 22204130),四川省科技厅重点研发项目(2020YFG0092, 2022NSFS1211),中央高校基础研究基金(2682021ZTPY031, 2682021CX087)的资助。
论文链接:https://doi.org/10.1016/j.cej.2024.151952
课题组主页:https://faculty.swjtu.edu.cn/mengtao/zh_CN/index.htm
文字/尹伟
{kind=link}
